
Kinematic Wheel Centre Recession – Suspension KPI
Kinematic wheel centre recession is a measure of the longitudinal motion of the wheel centre when the suspension travels into bump. The metric is measured in millimetres of wheel recession (rearward longitudinal motion) per metre of wheel travel, mm/m.
A positive value for this KPI indicates that the wheel travels rearwards as the wheel moves into bump. This is a desirable situation from a ride comfort point of view but is not always possible as kinematic wheel centre recession is linked with other KPIs and as a result must be tuned carefully. The amount of kinematic recession in a suspension system is determined by the position of the longitudinal pole or castor pole as shown below.
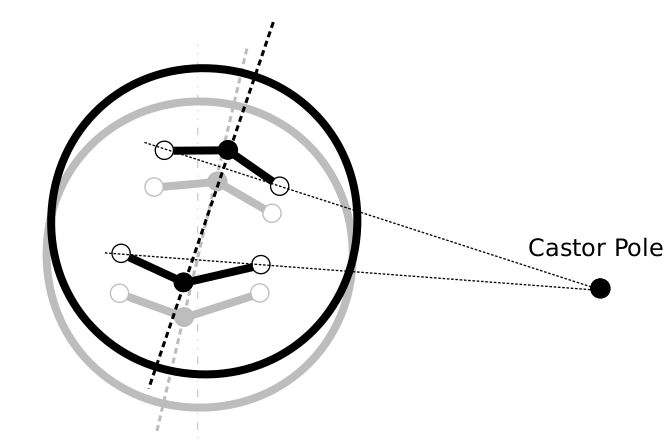
Both the vertical height and longitudinal position of the castor pole relative to wheel centre are key. If the castor pole is below wheel centre in side view, the wheel will exhibit kinematic recession and travel rearwards in bump. If the castor pole is above wheel centre in side view, the wheel will have kinematic precession and travel forwards with suspension bump. For a given pole height, the amount of kinematic recession (or precession) is governed by the longitudinal distance between the castor pole and the wheel centre.
This KPI page is only a brief overview. To learn more about this and other KPIs, including KPI values used in industry, real-world examples and best-practice guidance, please refer to our courses below.
—
ENHANCE YOUR CHASSIS AND SUSPENSION SYSTEMS EXPERTISE WITH CUTTING-EDGE SOFTWARE SOLUTIONS AND SUSPENSION COURSES
AUTOMOTIVE/MOTORSPORT SUSPENSION AND CHASSIS SYSTEMS – DESIGN AND ENGINEERING FUNDAMENTALS COURSE
SUSPENSION PERFORMANCE TUNING USING MULTIBODY SIMULATION SOFTWARE COURSE
START USING RACE SOFTWARE TODAY WITH A FREE TRIAL ON ALL PLANS